Publications
Here you can find my GoogleScholar
ICRA Publications
-
 Resilient Legged Local Navigation: Learning to Traverse with Compromised Perception End-to-EndJin Jin, Chong Zhang, Jonas Frey, and 4 more authorsIn IEEE International Conference on Robotics and Automation (ICRA 2024), 2023
Resilient Legged Local Navigation: Learning to Traverse with Compromised Perception End-to-EndJin Jin, Chong Zhang, Jonas Frey, and 4 more authorsIn IEEE International Conference on Robotics and Automation (ICRA 2024), 2023@inproceedings{jin2023resilient, author = {Jin, Jin and Zhang, Chong and Frey, Jonas and Rudin, Nikita and Mattamala, Matias and Cadena, Cesar and Hutter, Marco}, booktitle = {IEEE International Conference on Robotics and Automation (ICRA 2024)}, icra = {true}, title = {Resilient Legged Local Navigation: Learning to Traverse with Compromised Perception End-to-End}, url = {https://arxiv.org/abs/2310.03581}, year = {2023} } -
 Diffusion Based Robust LiDAR Place RecognitionBenjamin Krummenacher, Jonas Frey, Turcan Tuna, and 2 more authorsIEEE International Conference on Robotics and Automation (ICRA), 2025
Diffusion Based Robust LiDAR Place RecognitionBenjamin Krummenacher, Jonas Frey, Turcan Tuna, and 2 more authorsIEEE International Conference on Robotics and Automation (ICRA), 2025@article{krummenacher2025diffusion, author = {Krummenacher, Benjamin and Frey, Jonas and Tuna, Turcan and Vysotska, Olga and Hutter, Marco}, icra = {true}, journal = {IEEE International Conference on Robotics and Automation (ICRA)}, title = {Diffusion Based Robust LiDAR Place Recognition}, year = {2025} } -
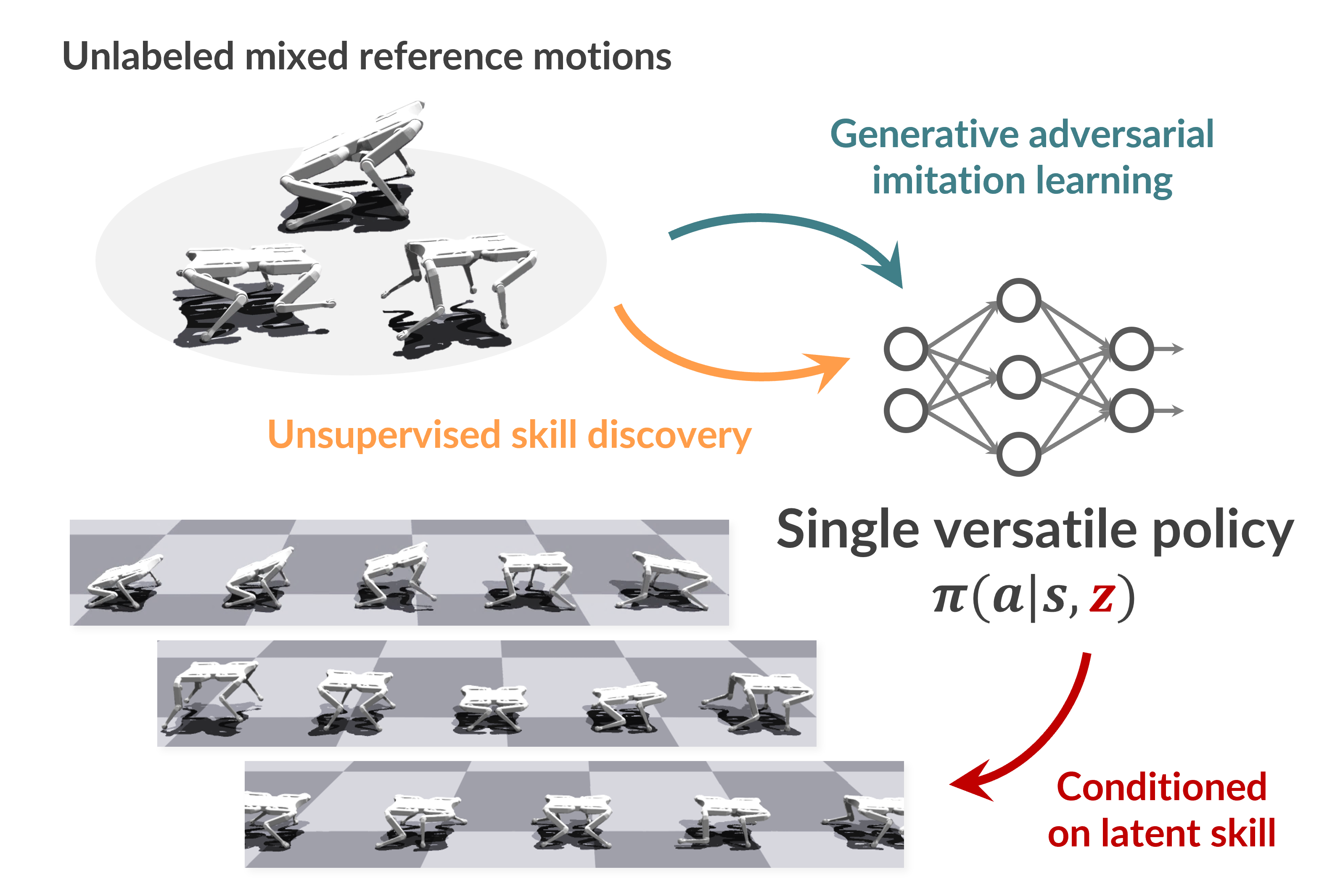 Versatile skill control via self-supervised adversarial imitation of unlabeled mixed motionsChenhao Li, Sebastian Blaes, Pavel Kolev, and 3 more authorsIn IEEE International Conference on Robotics and Automation (ICRA 2023), 2023
Versatile skill control via self-supervised adversarial imitation of unlabeled mixed motionsChenhao Li, Sebastian Blaes, Pavel Kolev, and 3 more authorsIn IEEE International Conference on Robotics and Automation (ICRA 2023), 2023@inproceedings{li2023versatile, author = {Li, Chenhao and Blaes, Sebastian and Kolev, Pavel and Vlastelica, Marin and Frey, Jonas and Martius, Georg}, booktitle = {IEEE International Conference on Robotics and Automation (ICRA 2023)}, icra = {true}, loc = {true}, organization = {IEEE}, pages = {2944--2950}, title = {Versatile skill control via self-supervised adversarial imitation of unlabeled mixed motions}, url = {https://arxiv.org/abs/2209.07899}, year = {2023} } -
 Learning risk-aware quadrupedal locomotion using distributional reinforcement learningLukas Schneider, Jonas Frey, Takahiro Miki, and 1 more authorIn IEEE International Conference on Robotics and Automation (ICRA 2024), 2023
Learning risk-aware quadrupedal locomotion using distributional reinforcement learningLukas Schneider, Jonas Frey, Takahiro Miki, and 1 more authorIn IEEE International Conference on Robotics and Automation (ICRA 2024), 2023@inproceedings{schneider2023learning, author = {Schneider, Lukas and Frey, Jonas and Miki, Takahiro and Hutter, Marco}, booktitle = {IEEE International Conference on Robotics and Automation (ICRA 2024)}, icra = {true}, loc = {true}, title = {Learning risk-aware quadrupedal locomotion using distributional reinforcement learning}, url = {https://arxiv.org/abs/2309.14246}, year = {2023} }
IROS Publications
-
 MEM: Multi-Modal Elevation Mapping for Robotics and LearningGian Erni, Jonas Frey, Takahiro Miki, and 2 more authorsIn International Conference on Intelligent Robots and Systems (IROS 2023), 2023
MEM: Multi-Modal Elevation Mapping for Robotics and LearningGian Erni, Jonas Frey, Takahiro Miki, and 2 more authorsIn International Conference on Intelligent Robots and Systems (IROS 2023), 2023@inproceedings{erni2023mem, author = {Erni, Gian and Frey, Jonas and Miki, Takahiro and Mattamala, Matias and Hutter, Marco}, booktitle = {International Conference on Intelligent Robots and Systems (IROS 2023)}, iros = {true}, title = {MEM: Multi-Modal Elevation Mapping for Robotics and Learning}, url = {https://arxiv.org/abs/2309.16818v1}, year = {2023} } -
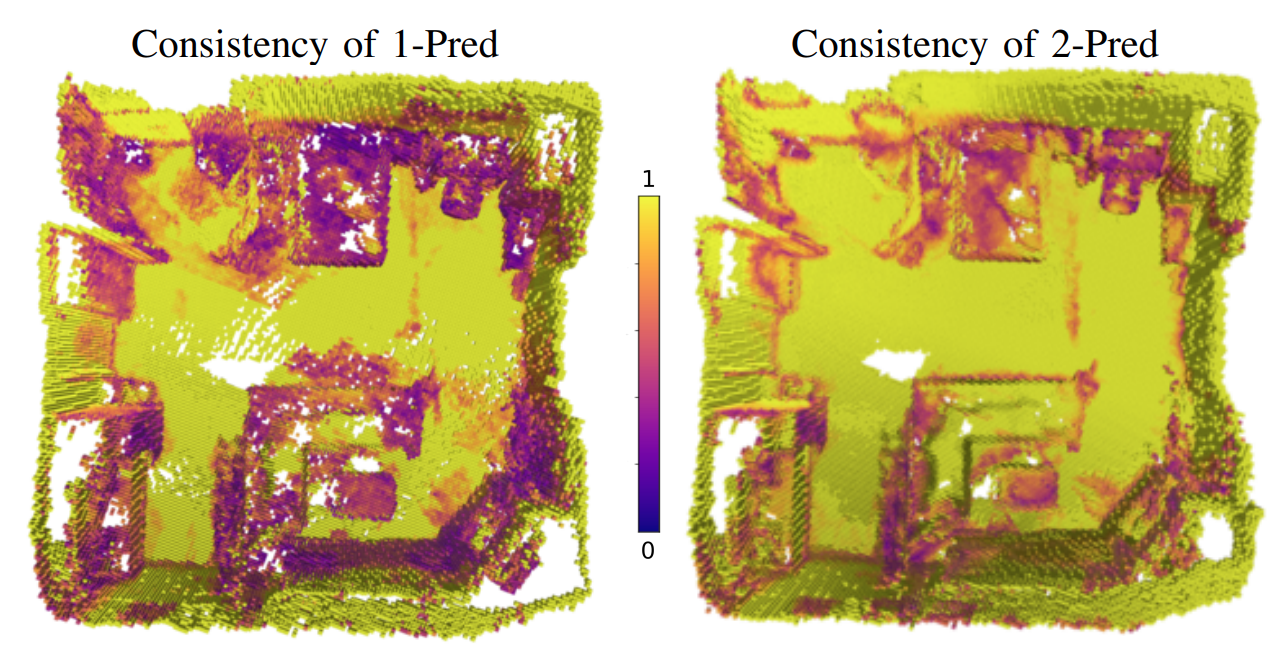
 Locomotion policy guided traversability learning using volumetric representations of complex environmentsJonas Frey, David Hoeller, Shehryar Khattak, and 1 more authorIn IROS, 2022
Locomotion policy guided traversability learning using volumetric representations of complex environmentsJonas Frey, David Hoeller, Shehryar Khattak, and 1 more authorIn IROS, 2022@inproceedings{frey2022locomotion, author = {Frey, Jonas and Hoeller, David and Khattak, Shehryar and Hutter, Marco}, booktitle = {IROS}, iros = {true}, organization = {IEEE}, pages = {5722--5729}, title = {Locomotion policy guided traversability learning using volumetric representations of complex environments}, url = {https://arxiv.org/abs/2203.15854}, year = {2022} }
RSS Publications
-
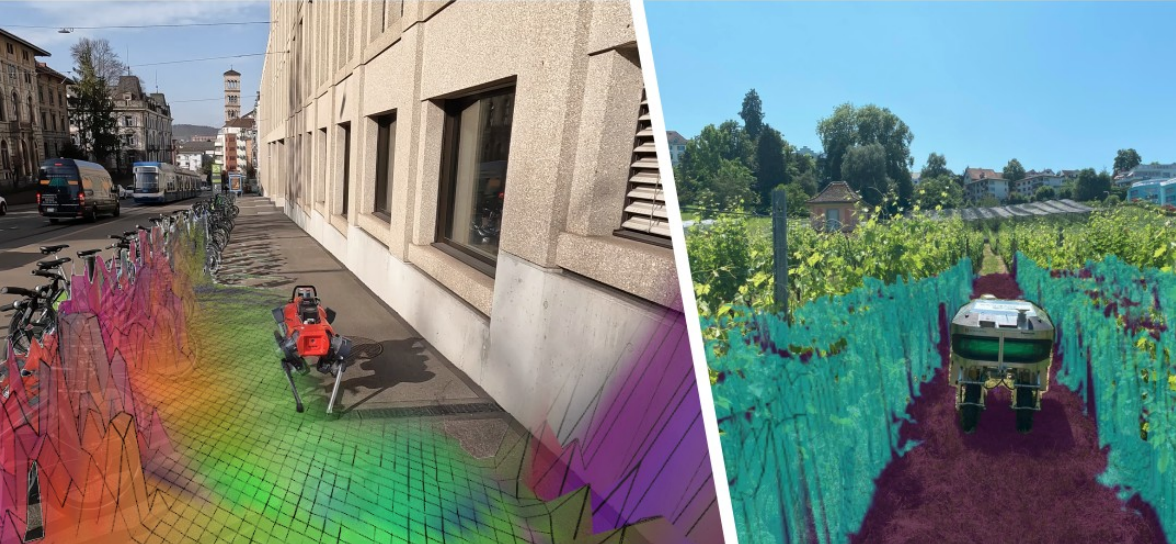
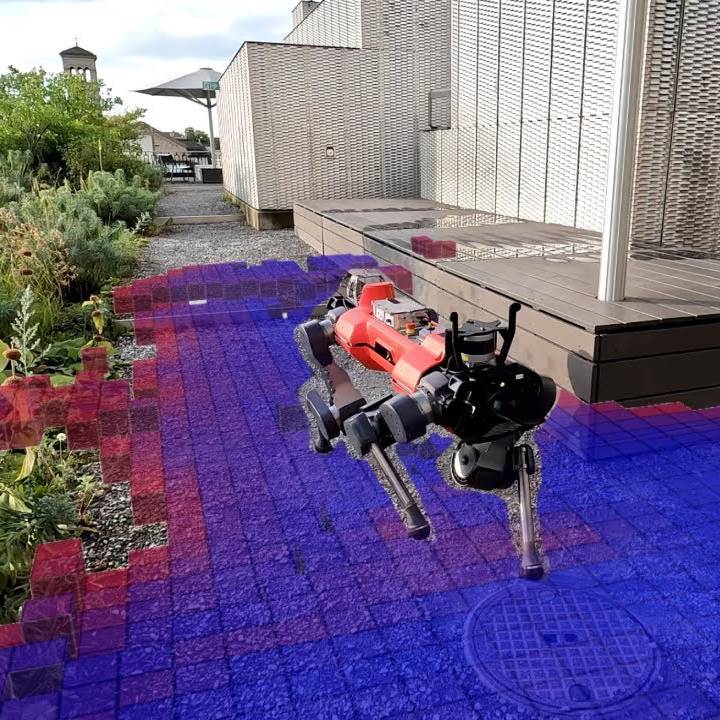
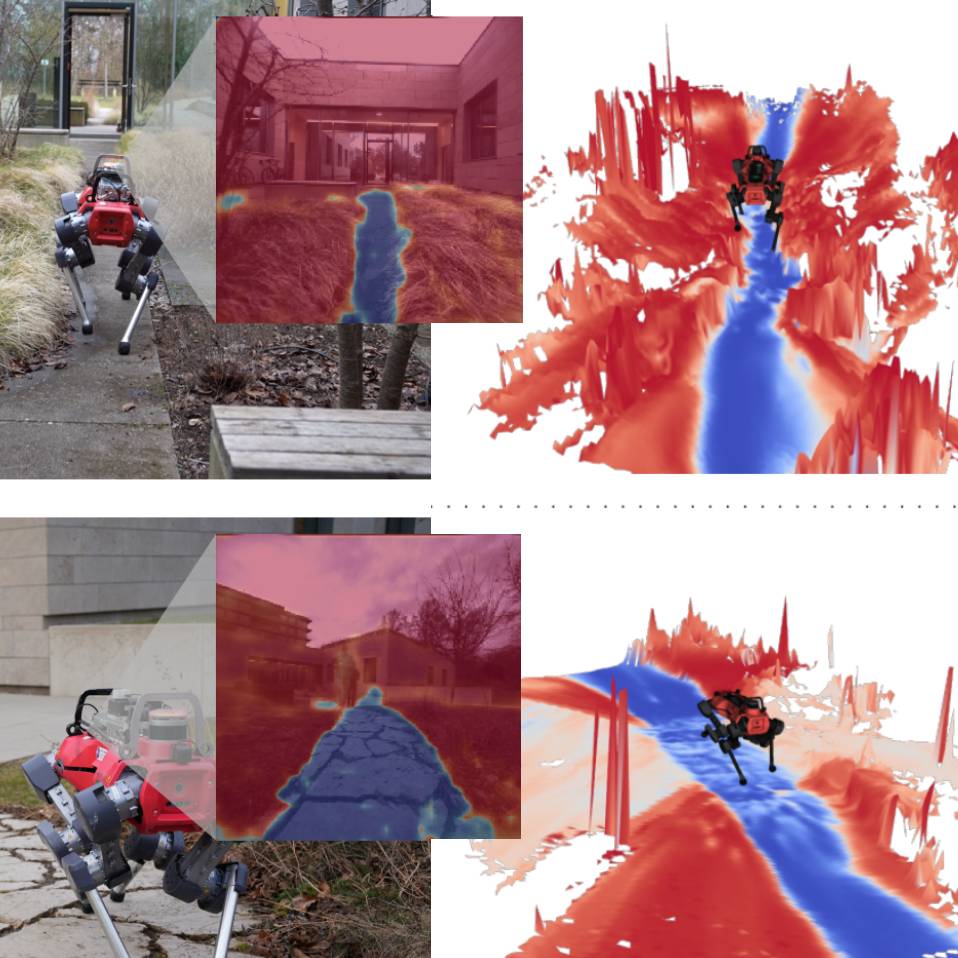
 Fast Traversability Estimation for Wild Visual NavigationJonas Frey, Matias Mattamala, Nived Chebrolu, and 3 more authorsIn Robotics: Science and Systems 2023, 2023
Fast Traversability Estimation for Wild Visual NavigationJonas Frey, Matias Mattamala, Nived Chebrolu, and 3 more authorsIn Robotics: Science and Systems 2023, 2023@inproceedings{frey2023fast, author = {Frey, Jonas and Mattamala, Matias and Chebrolu, Nived and Cadena, Cesar and Fallon, Maurice and Hutter, Marco}, booktitle = {Robotics: Science and Systems 2023}, rss = {true}, title = {Fast Traversability Estimation for Wild Visual Navigation}, url = {https://arxiv.org/abs/2305.08510}, year = {2023} } -
 Boxi: Design Decisions in the Context of Algorithmic Performance for RoboticsJonas Frey, Turcan Tuna, Lanke Frank Tarimo Fu, and 8 more authorsRobotics: Science and Systems 2025, 2025
Boxi: Design Decisions in the Context of Algorithmic Performance for RoboticsJonas Frey, Turcan Tuna, Lanke Frank Tarimo Fu, and 8 more authorsRobotics: Science and Systems 2025, 2025@article{frey2025boxi, author = {Frey, Jonas and Tuna, Turcan and Fu, Lanke Frank Tarimo and Weibel, Cedric and Patterson, Katharine and Krummenacher, Benjamin and M{\"u}ller, Matthias and Nubert, Julian and Fallon, Maurice and Cadena, Cesar and others}, journal = {Robotics: Science and Systems 2025}, rss = {true}, title = {Boxi: Design Decisions in the Context of Algorithmic Performance for Robotics}, year = {2025} } -
 Learned Perceptive Forward Dynamics Model for Safe and Platform-aware Robotic NavigationPascal Roth, Jonas Frey, Cesar Cadena, and 1 more authorRobotics: Science and Systems 2025, 2025
Learned Perceptive Forward Dynamics Model for Safe and Platform-aware Robotic NavigationPascal Roth, Jonas Frey, Cesar Cadena, and 1 more authorRobotics: Science and Systems 2025, 2025@article{roth2025learned, author = {Roth, Pascal and Frey, Jonas and Cadena, Cesar and Hutter, Marco}, journal = {Robotics: Science and Systems 2025}, rss = {true}, title = {Learned Perceptive Forward Dynamics Model for Safe and Platform-aware Robotic Navigation}, year = {2025} }
CoRL Publications
-
 Learning agile skills via adversarial imitation of rough partial demonstrationsChenhao Li, Marin Vlastelica, Sebastian Blaes, and 3 more authorsIn Conference on Robot Learning, 2023
Learning agile skills via adversarial imitation of rough partial demonstrationsChenhao Li, Marin Vlastelica, Sebastian Blaes, and 3 more authorsIn Conference on Robot Learning, 2023@inproceedings{li2023learning, author = {Li, Chenhao and Vlastelica, Marin and Blaes, Sebastian and Frey, Jonas and Grimminger, Felix and Martius, Georg}, booktitle = {Conference on Robot Learning}, corl = {true}, loc = {true}, organization = {PMLR}, pages = {342--352}, title = {Learning agile skills via adversarial imitation of rough partial demonstrations}, url = {https://arxiv.org/abs/2206.11693}, year = {2023} }
CVPR Publications
-
 Unsupervised Continual Semantic Adaptation through Neural RenderingZhizheng Liu, Francesco Milano, Jonas Frey, and 3 more authorsIn Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023
Unsupervised Continual Semantic Adaptation through Neural RenderingZhizheng Liu, Francesco Milano, Jonas Frey, and 3 more authorsIn Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023@inproceedings{liu2023unsupervised, author = {Liu, Zhizheng and Milano, Francesco and Frey, Jonas and Siegwart, Roland and Blum, Hermann and Cadena, Cesar}, booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, cvpr = {true}, pages = {3031--3040}, title = {Unsupervised Continual Semantic Adaptation through Neural Rendering}, url = {https://arxiv.org/abs/2211.13969}, year = {2023} }
ICML Publications
-
 Learning with 3D rotations, a hitchhiker’s guide to SO(3)A. René Geist, Jonas Frey, Mikel Zobro, and 2 more authorsIn International Conference on Machine Learning, 2024
Learning with 3D rotations, a hitchhiker’s guide to SO(3)A. René Geist, Jonas Frey, Mikel Zobro, and 2 more authorsIn International Conference on Machine Learning, 2024@inproceedings{geist2024position, archiveprefix = {arXiv}, author = {Geist, A. René and Frey, Jonas and Zobro, Mikel and Levina, Anna and Martius, Georg}, booktitle = {International Conference on Machine Learning}, eprint = {2404.11735}, icml = {true}, learning = {true}, primaryclass = {cs.LG}, title = {Learning with 3D rotations, a hitchhiker's guide to SO(3)}, url = {https://arxiv.org/abs/2404.11735}, year = {2024} } -
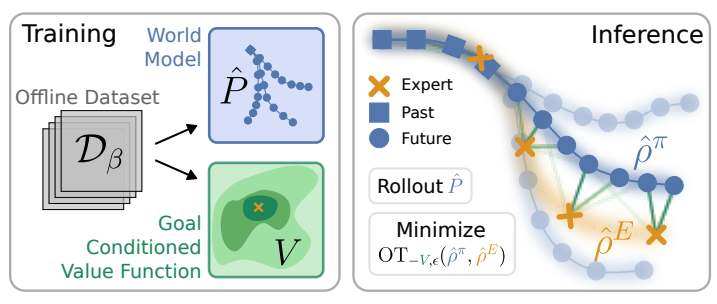 Zero-Shot Offline Imitation Learning via Optimal TransportThomas Rupf, Marco Bagatella, Nico Gürtler, and 2 more authorsIn , 2025
Zero-Shot Offline Imitation Learning via Optimal TransportThomas Rupf, Marco Bagatella, Nico Gürtler, and 2 more authorsIn , 2025@inproceedings{rupf2024zeroshot, archiveprefix = {arXiv}, author = {Rupf, Thomas and Bagatella, Marco and Gürtler, Nico and Frey, Jonas and Martius, Georg}, eprint = {2410.08751}, icml = {true}, journal = {International Conference on Machine Learning (ICML)}, learning = {true}, primaryclass = {cs.LG}, title = {Zero-Shot Offline Imitation Learning via Optimal Transport}, url = {https://arxiv.org/abs/2410.08751}, year = {2025} }
TRO Publications
-
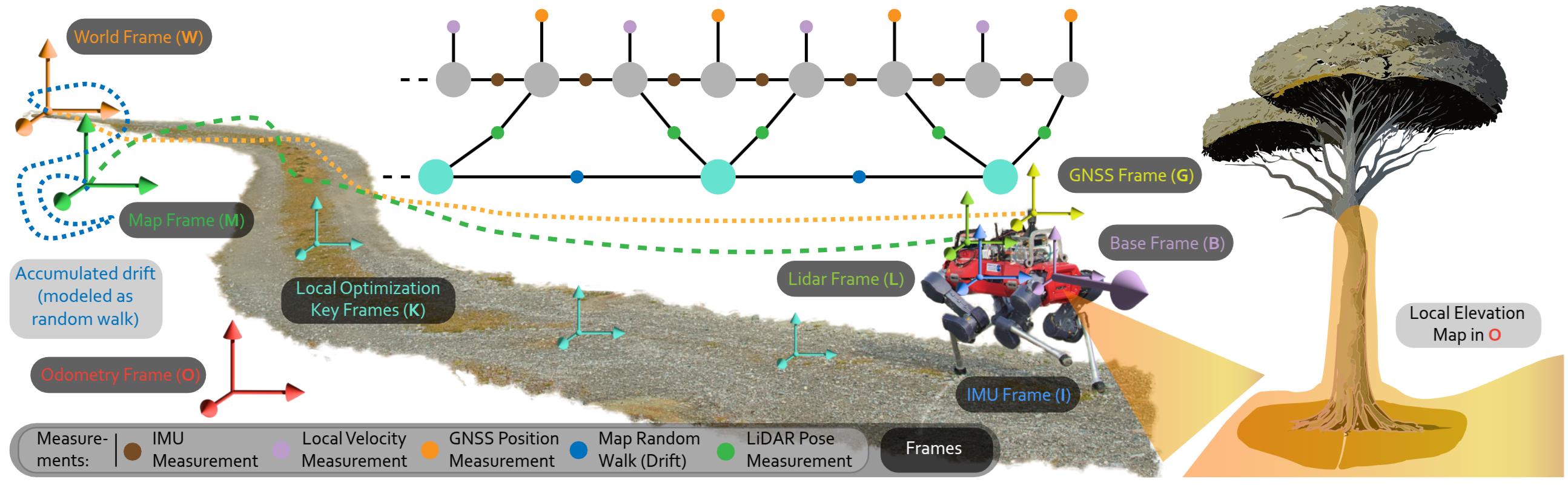 Holistic fusion: Task-and setup-agnostic robot localization and state estimation with factor graphsJulian Nubert, Turcan Tuna, Jonas Frey, and 4 more authorsunder review for IEEE Transactions on Robotics, 2025
Holistic fusion: Task-and setup-agnostic robot localization and state estimation with factor graphsJulian Nubert, Turcan Tuna, Jonas Frey, and 4 more authorsunder review for IEEE Transactions on Robotics, 2025@article{nubert2025holistic, author = {Nubert, Julian and Tuna, Turcan and Frey, Jonas and Cadena, Cesar and Kuchenbecker, Katherine J and Khattak, Shehryar and Hutter, Marco}, comment = {This paper is under review for IEEE Transactions on Robotics}, journal = {under review for IEEE Transactions on Robotics}, title = {Holistic fusion: Task-and setup-agnostic robot localization and state estimation with factor graphs}, tro = {true}, year = {2025} }
RAM Publications
-
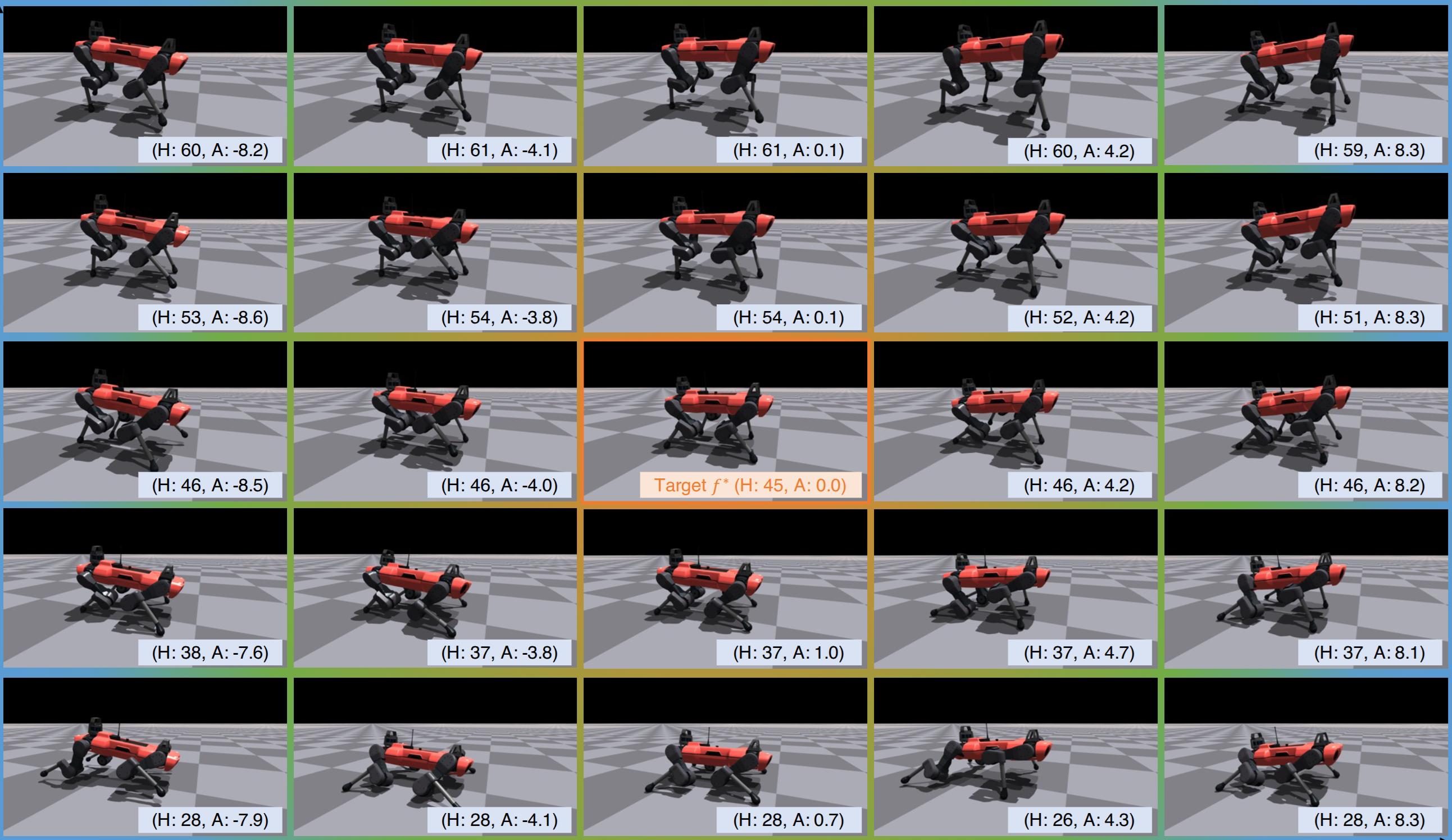 DAPPER: Discriminability-Aware Policy-to-Policy Preference-Based Reinforcement Learning for Query-Efficient Robot Skill AcquisitionYuki Kadokawa, Jonas Frey, Takahiro Miki, and 2 more authorsunder review for IEEE Robotics & Automation Magazine, 2025
DAPPER: Discriminability-Aware Policy-to-Policy Preference-Based Reinforcement Learning for Query-Efficient Robot Skill AcquisitionYuki Kadokawa, Jonas Frey, Takahiro Miki, and 2 more authorsunder review for IEEE Robotics & Automation Magazine, 2025@article{kadokawa2025dapper, author = {Kadokawa, Yuki and Frey, Jonas and Miki, Takahiro and Matsubara, Takamitsu and Hutter, Marco}, comment = {This paper is under review for IEEE Robotics & Automation Magazine}, journal = {under review for IEEE Robotics & Automation Magazine}, ram = {true}, title = {DAPPER: Discriminability-Aware Policy-to-Policy Preference-Based Reinforcement Learning for Query-Efficient Robot Skill Acquisition}, year = {2025} }
RAL Publications
-
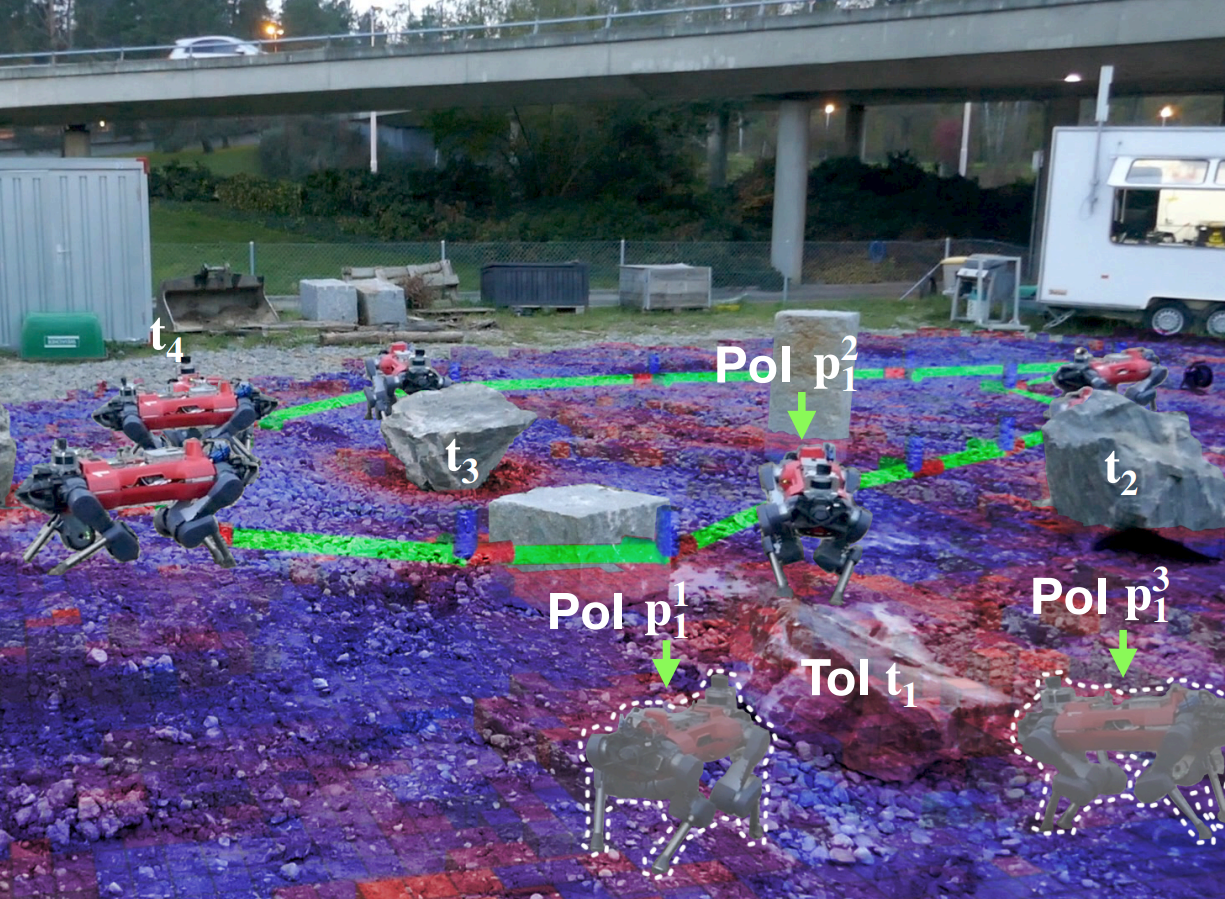 SMUG Planner: A Safe Multi-Goal Planner for Mobile Robots in Challenging EnvironmentsChangan Chen, Jonas Frey, Philip Arm, and 1 more authorIEEE Robotics and Automation Letters, 2023
SMUG Planner: A Safe Multi-Goal Planner for Mobile Robots in Challenging EnvironmentsChangan Chen, Jonas Frey, Philip Arm, and 1 more authorIEEE Robotics and Automation Letters, 2023@article{chen2023smug, author = {Chen, Changan and Frey, Jonas and Arm, Philip and Hutter, Marco}, journal = {IEEE Robotics and Automation Letters}, number = {11}, pages = {7170--7177}, publisher = {IEEE}, ral = {true}, title = {SMUG Planner: A Safe Multi-Goal Planner for Mobile Robots in Challenging Environments}, url = {https://arxiv.org/abs/2306.05309}, venue = {RAL}, volume = {8}, year = {2023} } -
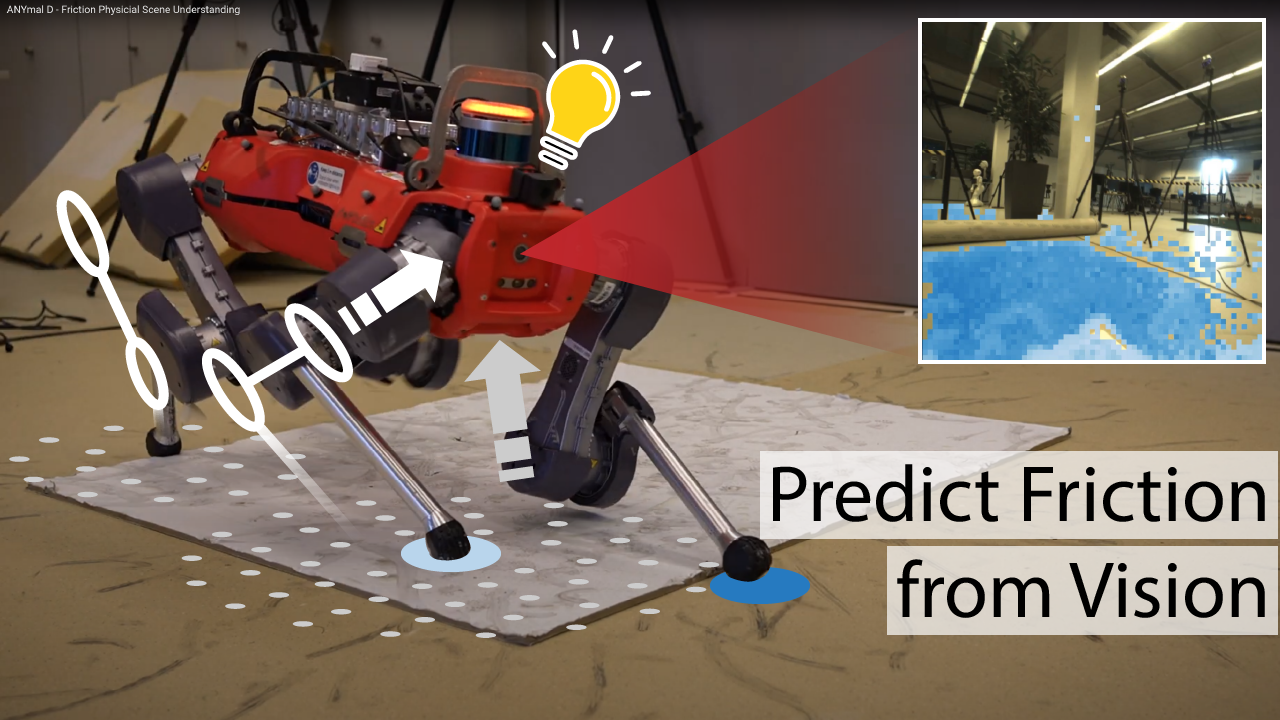 Identifying Terrain Physical Parameters From Vision - Towards Physical-Parameter-Aware Locomotion and NavigationJiaqi Chen, Jonas Frey, Ruyi Zhou, and 3 more authorsIEEE Robotics and Automation Letters, 2024
Identifying Terrain Physical Parameters From Vision - Towards Physical-Parameter-Aware Locomotion and NavigationJiaqi Chen, Jonas Frey, Ruyi Zhou, and 3 more authorsIEEE Robotics and Automation Letters, 2024@article{chen2024identifying, author = {Chen, Jiaqi and Frey, Jonas and Zhou, Ruyi and Miki, Takahiro and Martius, Georg and Hutter, Marco}, doi = {10.1109/LRA.2024.3455788}, journal = {IEEE Robotics and Automation Letters}, keywords = {Decoding;Friction;Visualization;Training;Robot sensing systems;Navigation;Legged locomotion;Deep learning;Visual perception;Terrain mapping;Legged Robots;deep learning for visual perception;field robots}, number = {11}, pages = {9279-9286}, ral = {true}, title = {Identifying Terrain Physical Parameters From Vision - Towards Physical-Parameter-Aware Locomotion and Navigation}, url = {https://arxiv.org/abs/2408.16567}, volume = {9}, year = {2024} } -
 Continual Adaptation of Semantic Segmentation using Complementary 2D-3D Data RepresentationsJonas Frey, Hermann Blum, Francesco Milano, and 2 more authorsIEEE Robotics and Automation Letters, 2022
Continual Adaptation of Semantic Segmentation using Complementary 2D-3D Data RepresentationsJonas Frey, Hermann Blum, Francesco Milano, and 2 more authorsIEEE Robotics and Automation Letters, 2022@article{frey2022continual, author = {Frey, Jonas and Blum, Hermann and Milano, Francesco and Siegwart, Roland and Cadena, Cesar}, journal = {IEEE Robotics and Automation Letters}, number = {4}, pages = {11665--11672}, publisher = {IEEE}, ral = {true}, title = {Continual Adaptation of Semantic Segmentation using Complementary 2D-3D Data Representations}, url = {https://arxiv.org/abs/2111.02156}, venue = {RAL}, volume = {7}, year = {2022} } -
 Seeing Through the Grass: Semantic Pointcloud Filter for Support Surface LearningAnqiao Li, Chenyu Yang, Jonas Frey, and 3 more authorsIEEE Robotics and Automation Letters, 2023
Seeing Through the Grass: Semantic Pointcloud Filter for Support Surface LearningAnqiao Li, Chenyu Yang, Jonas Frey, and 3 more authorsIEEE Robotics and Automation Letters, 2023@article{li2023seeing, author = {Li, Anqiao and Yang, Chenyu and Frey, Jonas and Lee, Joonho and Cadena, Cesar and Hutter, Marco}, journal = {IEEE Robotics and Automation Letters}, number = {11}, pages = {7687--7694}, publisher = {IEEE}, ral = {true}, title = {Seeing Through the Grass: Semantic Pointcloud Filter for Support Surface Learning}, url = {https://arxiv.org/abs/2305.07995}, venue = {RAL}, volume = {8}, year = {2023} } -
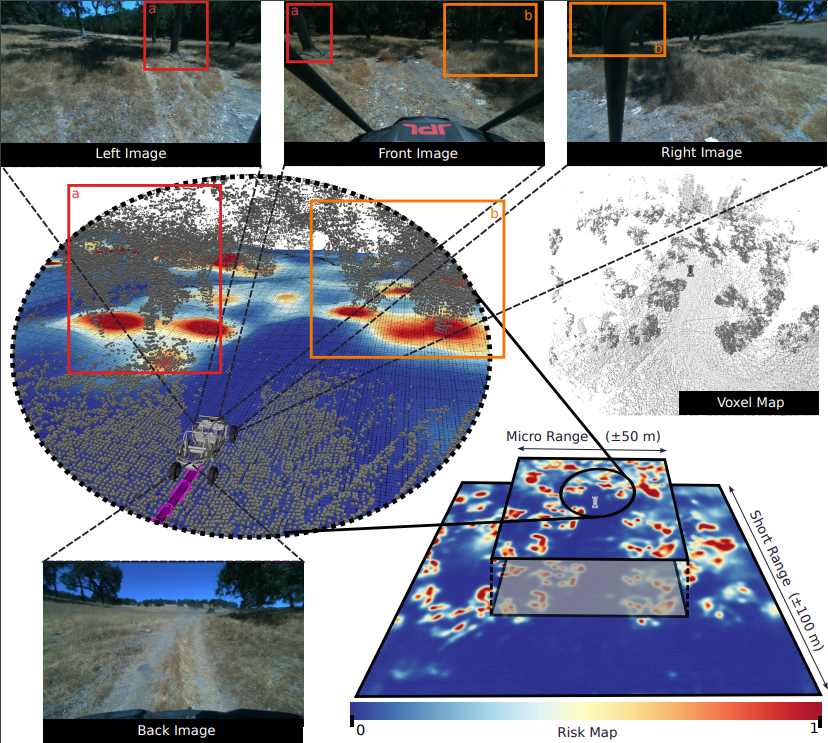 RoadRunner M&M - Learning Multi-Range Multi-Resolution Traversability Maps for Autonomous Off-Road NavigationManthan Patel, Jonas Frey, Deegan Atha, and 3 more authorsIEEE Robotics and Automation Letters, 2024
RoadRunner M&M - Learning Multi-Range Multi-Resolution Traversability Maps for Autonomous Off-Road NavigationManthan Patel, Jonas Frey, Deegan Atha, and 3 more authorsIEEE Robotics and Automation Letters, 2024@article{patel2024roadrunner, author = {Patel, Manthan and Frey, Jonas and Atha, Deegan and Spieler, Patrick and Hutter, Marco and Khattak, Shehryar}, doi = {10.1109/LRA.2024.3490404}, journal = {IEEE Robotics and Automation Letters}, number = {12}, pages = {11425-11432}, ral = {true}, title = {RoadRunner M&M - Learning Multi-Range Multi-Resolution Traversability Maps for Autonomous Off-Road Navigation}, url = {https://arxiv.org/abs/2409.10940}, volume = {9}, webpage = {https://leggedrobotics.github.io/roadrunner_mm/}, year = {2024} }
IJRR Publications
AuRo Publications
-
 Wild Visual Navigation: Fast Traversability Learning via Pre-Trained Models and Online Self-SupervisionMatías Mattamala, Jonas Frey, Piotr Libera, and 5 more authorsIn Autonomous Robots, 2024
Wild Visual Navigation: Fast Traversability Learning via Pre-Trained Models and Online Self-SupervisionMatías Mattamala, Jonas Frey, Piotr Libera, and 5 more authorsIn Autonomous Robots, 2024@inproceedings{mattamala24wild, archiveprefix = {arXiv}, auro = {true}, author = {Mattamala, Matías and Frey, Jonas and Libera, Piotr and Chebrolu, Nived and Martius, Georg and Cadena, Cesar and Hutter, Marco and Fallon, Maurice}, booktitle = {Autonomous Robots}, eprint = {2404.07110}, primaryclass = {cs.RO}, title = {Wild Visual Navigation: Fast Traversability Learning via Pre-Trained Models and Online Self-Supervision}, url = {https://arxiv.org/abs/2404.07110}, year = {2024} }
TFR Publications
-
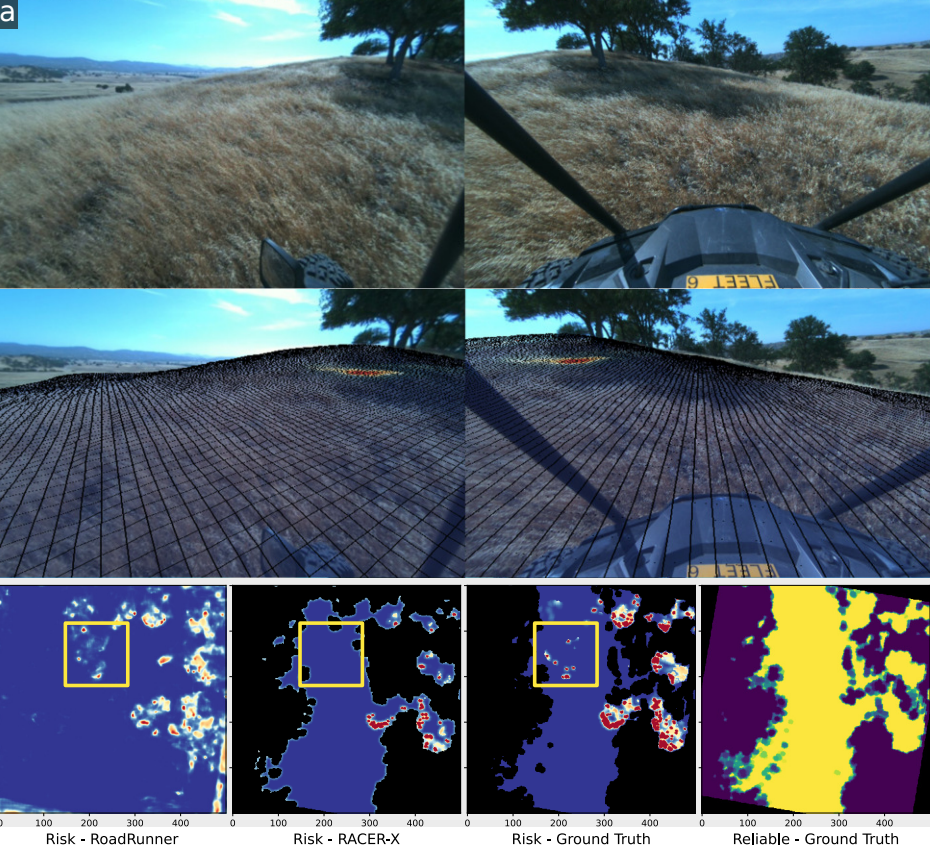 RoadRunner - Learning Traversability Estimation for Autonomous Off-road DrivingJonas Frey, Shehryar Khattak, Manthan Patel, and 5 more authorsIEEE Transactions on Field Robotics 2024, 2024
RoadRunner - Learning Traversability Estimation for Autonomous Off-road DrivingJonas Frey, Shehryar Khattak, Manthan Patel, and 5 more authorsIEEE Transactions on Field Robotics 2024, 2024@article{frey2024roadrunner, author = {Frey, Jonas and Khattak, Shehryar and Patel, Manthan and Atha, Deegan and Nubert, Julian and Padgett, Curtis and Hutter, Marco and Spieler, Patrick}, journal = {IEEE Transactions on Field Robotics 2024}, tfr = {true}, title = {RoadRunner - Learning Traversability Estimation for Autonomous Off-road Driving}, url = {https://arxiv.org/abs/2402.19341}, year = {2024} } -
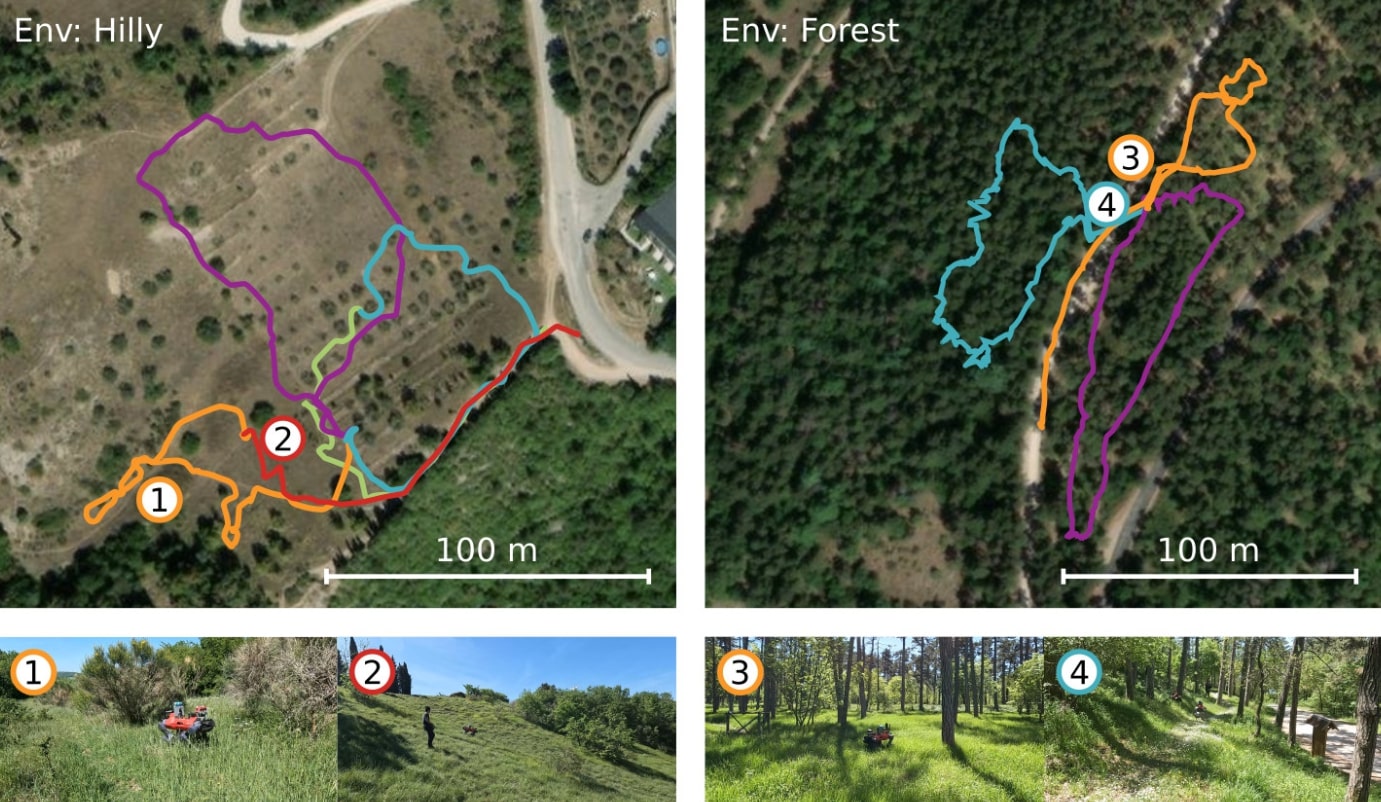
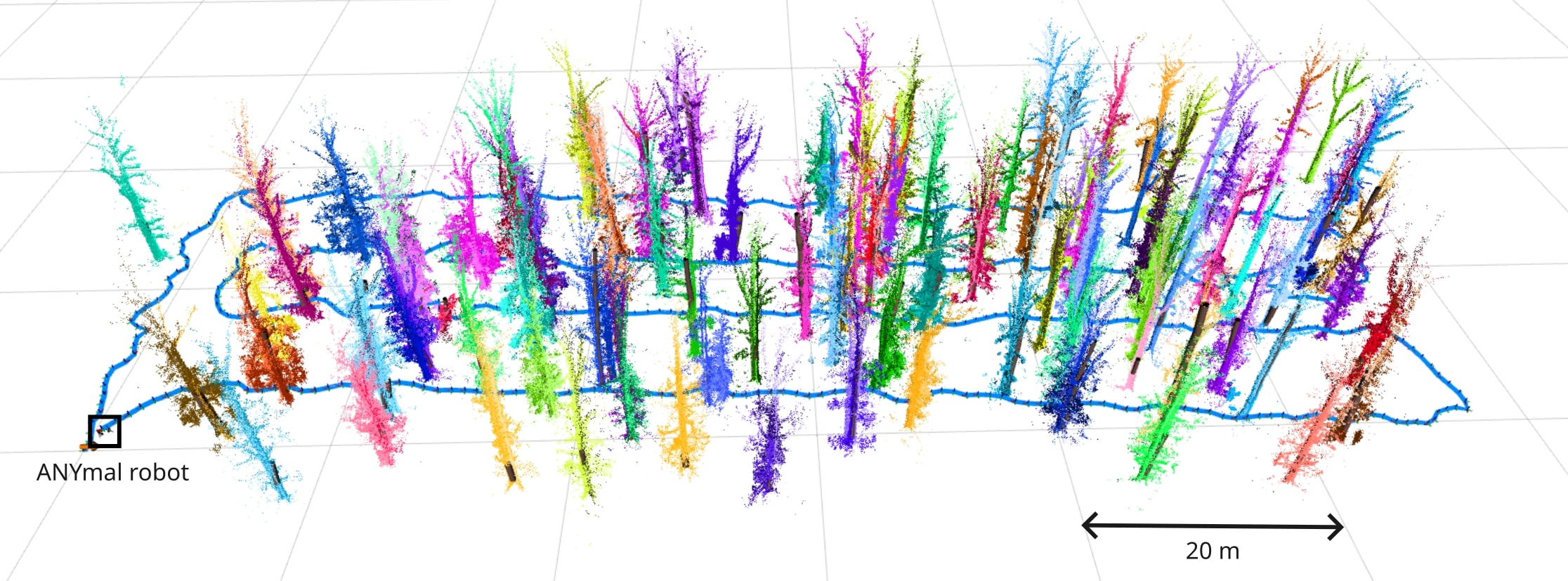 Building Forest Inventories with Autonomous Legged Robots–System, Lessons, and Challenges AheadMatı́as Mattamala, Nived Chebrolu, Jonas Frey, and 5 more authorsIEEE Transactions on Field Robotics 2025, 2024
Building Forest Inventories with Autonomous Legged Robots–System, Lessons, and Challenges AheadMatı́as Mattamala, Nived Chebrolu, Jonas Frey, and 5 more authorsIEEE Transactions on Field Robotics 2025, 2024@article{mattamala2025building, author = {Mattamala, Mat{\'\i}as and Chebrolu, Nived and Frey, Jonas and Frei{\ss}muth, Leonard and Oh, Haedam and Casseau, Benoit and Hutter, Marco and Fallon, Maurice}, journal = {IEEE Transactions on Field Robotics 2025}, tfr = {true}, title = {Building Forest Inventories with Autonomous Legged Robots--System, Lessons, and Challenges Ahead}, url = {https://arxiv.org/abs/2404.14157}, year = {2024} }
Navigation Publications
- SMUG Planner: A Safe Multi-Goal Planner for Mobile Robots in Challenging EnvironmentsChangan Chen, Jonas Frey, Philip Arm, and 1 more authorIEEE Robotics and Automation Letters, 2023
@article{chen2023smug, author = {Chen, Changan and Frey, Jonas and Arm, Philip and Hutter, Marco}, journal = {IEEE Robotics and Automation Letters}, number = {11}, pages = {7170--7177}, publisher = {IEEE}, ral = {true}, title = {SMUG Planner: A Safe Multi-Goal Planner for Mobile Robots in Challenging Environments}, url = {https://arxiv.org/abs/2306.05309}, venue = {RAL}, volume = {8}, year = {2023} } - MEM: Multi-Modal Elevation Mapping for Robotics and LearningGian Erni, Jonas Frey, Takahiro Miki, and 2 more authorsIn International Conference on Intelligent Robots and Systems (IROS 2023), 2023
@inproceedings{erni2023mem, author = {Erni, Gian and Frey, Jonas and Miki, Takahiro and Mattamala, Matias and Hutter, Marco}, booktitle = {International Conference on Intelligent Robots and Systems (IROS 2023)}, iros = {true}, title = {MEM: Multi-Modal Elevation Mapping for Robotics and Learning}, url = {https://arxiv.org/abs/2309.16818v1}, year = {2023} } - Locomotion policy guided traversability learning using volumetric representations of complex environmentsJonas Frey, David Hoeller, Shehryar Khattak, and 1 more authorIn IROS, 2022
@inproceedings{frey2022locomotion, author = {Frey, Jonas and Hoeller, David and Khattak, Shehryar and Hutter, Marco}, booktitle = {IROS}, iros = {true}, organization = {IEEE}, pages = {5722--5729}, title = {Locomotion policy guided traversability learning using volumetric representations of complex environments}, url = {https://arxiv.org/abs/2203.15854}, year = {2022} } - Fast Traversability Estimation for Wild Visual NavigationJonas Frey, Matias Mattamala, Nived Chebrolu, and 3 more authorsIn Robotics: Science and Systems 2023, 2023
@inproceedings{frey2023fast, author = {Frey, Jonas and Mattamala, Matias and Chebrolu, Nived and Cadena, Cesar and Fallon, Maurice and Hutter, Marco}, booktitle = {Robotics: Science and Systems 2023}, rss = {true}, title = {Fast Traversability Estimation for Wild Visual Navigation}, url = {https://arxiv.org/abs/2305.08510}, year = {2023} } - RoadRunner - Learning Traversability Estimation for Autonomous Off-road DrivingJonas Frey, Shehryar Khattak, Manthan Patel, and 5 more authorsIEEE Transactions on Field Robotics 2024, 2024
@article{frey2024roadrunner, author = {Frey, Jonas and Khattak, Shehryar and Patel, Manthan and Atha, Deegan and Nubert, Julian and Padgett, Curtis and Hutter, Marco and Spieler, Patrick}, journal = {IEEE Transactions on Field Robotics 2024}, tfr = {true}, title = {RoadRunner - Learning Traversability Estimation for Autonomous Off-road Driving}, url = {https://arxiv.org/abs/2402.19341}, year = {2024} } - Boxi: Design Decisions in the Context of Algorithmic Performance for RoboticsJonas Frey, Turcan Tuna, Lanke Frank Tarimo Fu, and 8 more authorsRobotics: Science and Systems 2025, 2025
@article{frey2025boxi, author = {Frey, Jonas and Tuna, Turcan and Fu, Lanke Frank Tarimo and Weibel, Cedric and Patterson, Katharine and Krummenacher, Benjamin and M{\"u}ller, Matthias and Nubert, Julian and Fallon, Maurice and Cadena, Cesar and others}, journal = {Robotics: Science and Systems 2025}, rss = {true}, title = {Boxi: Design Decisions in the Context of Algorithmic Performance for Robotics}, year = {2025} } - Resilient Legged Local Navigation: Learning to Traverse with Compromised Perception End-to-EndJin Jin, Chong Zhang, Jonas Frey, and 4 more authorsIn IEEE International Conference on Robotics and Automation (ICRA 2024), 2023
@inproceedings{jin2023resilient, author = {Jin, Jin and Zhang, Chong and Frey, Jonas and Rudin, Nikita and Mattamala, Matias and Cadena, Cesar and Hutter, Marco}, booktitle = {IEEE International Conference on Robotics and Automation (ICRA 2024)}, icra = {true}, title = {Resilient Legged Local Navigation: Learning to Traverse with Compromised Perception End-to-End}, url = {https://arxiv.org/abs/2310.03581}, year = {2023} } - Wild Visual Navigation: Fast Traversability Learning via Pre-Trained Models and Online Self-SupervisionMatías Mattamala, Jonas Frey, Piotr Libera, and 5 more authorsIn Autonomous Robots, 2024
@inproceedings{mattamala24wild, archiveprefix = {arXiv}, auro = {true}, author = {Mattamala, Matías and Frey, Jonas and Libera, Piotr and Chebrolu, Nived and Martius, Georg and Cadena, Cesar and Hutter, Marco and Fallon, Maurice}, booktitle = {Autonomous Robots}, eprint = {2404.07110}, primaryclass = {cs.RO}, title = {Wild Visual Navigation: Fast Traversability Learning via Pre-Trained Models and Online Self-Supervision}, url = {https://arxiv.org/abs/2404.07110}, year = {2024} } - RoadRunner M&M - Learning Multi-Range Multi-Resolution Traversability Maps for Autonomous Off-Road NavigationManthan Patel, Jonas Frey, Deegan Atha, and 3 more authorsIEEE Robotics and Automation Letters, 2024
@article{patel2024roadrunner, author = {Patel, Manthan and Frey, Jonas and Atha, Deegan and Spieler, Patrick and Hutter, Marco and Khattak, Shehryar}, doi = {10.1109/LRA.2024.3490404}, journal = {IEEE Robotics and Automation Letters}, number = {12}, pages = {11425-11432}, ral = {true}, title = {RoadRunner M&M - Learning Multi-Range Multi-Resolution Traversability Maps for Autonomous Off-Road Navigation}, url = {https://arxiv.org/abs/2409.10940}, volume = {9}, webpage = {https://leggedrobotics.github.io/roadrunner_mm/}, year = {2024} } - Learned Perceptive Forward Dynamics Model for Safe and Platform-aware Robotic NavigationPascal Roth, Jonas Frey, Cesar Cadena, and 1 more authorRobotics: Science and Systems 2025, 2025
@article{roth2025learned, author = {Roth, Pascal and Frey, Jonas and Cadena, Cesar and Hutter, Marco}, journal = {Robotics: Science and Systems 2025}, rss = {true}, title = {Learned Perceptive Forward Dynamics Model for Safe and Platform-aware Robotic Navigation}, year = {2025} }
Learning Publications
- Learning with 3D rotations, a hitchhiker’s guide to SO(3)A. René Geist, Jonas Frey, Mikel Zobro, and 2 more authorsIn International Conference on Machine Learning, 2024
@inproceedings{geist2024position, archiveprefix = {arXiv}, author = {Geist, A. René and Frey, Jonas and Zobro, Mikel and Levina, Anna and Martius, Georg}, booktitle = {International Conference on Machine Learning}, eprint = {2404.11735}, icml = {true}, learning = {true}, primaryclass = {cs.LG}, title = {Learning with 3D rotations, a hitchhiker's guide to SO(3)}, url = {https://arxiv.org/abs/2404.11735}, year = {2024} } - Zero-Shot Offline Imitation Learning via Optimal TransportThomas Rupf, Marco Bagatella, Nico Gürtler, and 2 more authorsIn , 2025
@inproceedings{rupf2024zeroshot, archiveprefix = {arXiv}, author = {Rupf, Thomas and Bagatella, Marco and Gürtler, Nico and Frey, Jonas and Martius, Georg}, eprint = {2410.08751}, icml = {true}, journal = {International Conference on Machine Learning (ICML)}, learning = {true}, primaryclass = {cs.LG}, title = {Zero-Shot Offline Imitation Learning via Optimal Transport}, url = {https://arxiv.org/abs/2410.08751}, year = {2025} }
Locomotion Publications
- Learning agile skills via adversarial imitation of rough partial demonstrationsChenhao Li, Marin Vlastelica, Sebastian Blaes, and 3 more authorsIn Conference on Robot Learning, 2023
@inproceedings{li2023learning, author = {Li, Chenhao and Vlastelica, Marin and Blaes, Sebastian and Frey, Jonas and Grimminger, Felix and Martius, Georg}, booktitle = {Conference on Robot Learning}, corl = {true}, loc = {true}, organization = {PMLR}, pages = {342--352}, title = {Learning agile skills via adversarial imitation of rough partial demonstrations}, url = {https://arxiv.org/abs/2206.11693}, year = {2023} } - Versatile skill control via self-supervised adversarial imitation of unlabeled mixed motionsChenhao Li, Sebastian Blaes, Pavel Kolev, and 3 more authorsIn IEEE International Conference on Robotics and Automation (ICRA 2023), 2023
@inproceedings{li2023versatile, author = {Li, Chenhao and Blaes, Sebastian and Kolev, Pavel and Vlastelica, Marin and Frey, Jonas and Martius, Georg}, booktitle = {IEEE International Conference on Robotics and Automation (ICRA 2023)}, icra = {true}, loc = {true}, organization = {IEEE}, pages = {2944--2950}, title = {Versatile skill control via self-supervised adversarial imitation of unlabeled mixed motions}, url = {https://arxiv.org/abs/2209.07899}, year = {2023} } - Learning risk-aware quadrupedal locomotion using distributional reinforcement learningLukas Schneider, Jonas Frey, Takahiro Miki, and 1 more authorIn IEEE International Conference on Robotics and Automation (ICRA 2024), 2023
@inproceedings{schneider2023learning, author = {Schneider, Lukas and Frey, Jonas and Miki, Takahiro and Hutter, Marco}, booktitle = {IEEE International Conference on Robotics and Automation (ICRA 2024)}, icra = {true}, loc = {true}, title = {Learning risk-aware quadrupedal locomotion using distributional reinforcement learning}, url = {https://arxiv.org/abs/2309.14246}, year = {2023} }
Perception Publications
- Identifying Terrain Physical Parameters From Vision - Towards Physical-Parameter-Aware Locomotion and NavigationJiaqi Chen, Jonas Frey, Ruyi Zhou, and 3 more authorsIEEE Robotics and Automation Letters, 2024
@article{chen2024identifying, author = {Chen, Jiaqi and Frey, Jonas and Zhou, Ruyi and Miki, Takahiro and Martius, Georg and Hutter, Marco}, doi = {10.1109/LRA.2024.3455788}, journal = {IEEE Robotics and Automation Letters}, keywords = {Decoding;Friction;Visualization;Training;Robot sensing systems;Navigation;Legged locomotion;Deep learning;Visual perception;Terrain mapping;Legged Robots;deep learning for visual perception;field robots}, number = {11}, pages = {9279-9286}, ral = {true}, title = {Identifying Terrain Physical Parameters From Vision - Towards Physical-Parameter-Aware Locomotion and Navigation}, url = {https://arxiv.org/abs/2408.16567}, volume = {9}, year = {2024} } - Continual Adaptation of Semantic Segmentation using Complementary 2D-3D Data RepresentationsJonas Frey, Hermann Blum, Francesco Milano, and 2 more authorsIEEE Robotics and Automation Letters, 2022
@article{frey2022continual, author = {Frey, Jonas and Blum, Hermann and Milano, Francesco and Siegwart, Roland and Cadena, Cesar}, journal = {IEEE Robotics and Automation Letters}, number = {4}, pages = {11665--11672}, publisher = {IEEE}, ral = {true}, title = {Continual Adaptation of Semantic Segmentation using Complementary 2D-3D Data Representations}, url = {https://arxiv.org/abs/2111.02156}, venue = {RAL}, volume = {7}, year = {2022} } - Boxi: Design Decisions in the Context of Algorithmic Performance for RoboticsJonas Frey, Turcan Tuna, Lanke Frank Tarimo Fu, and 8 more authorsRobotics: Science and Systems 2025, 2025
@article{frey2025boxi, author = {Frey, Jonas and Tuna, Turcan and Fu, Lanke Frank Tarimo and Weibel, Cedric and Patterson, Katharine and Krummenacher, Benjamin and M{\"u}ller, Matthias and Nubert, Julian and Fallon, Maurice and Cadena, Cesar and others}, journal = {Robotics: Science and Systems 2025}, rss = {true}, title = {Boxi: Design Decisions in the Context of Algorithmic Performance for Robotics}, year = {2025} } - Diffusion Based Robust LiDAR Place RecognitionBenjamin Krummenacher, Jonas Frey, Turcan Tuna, and 2 more authorsIEEE International Conference on Robotics and Automation (ICRA), 2025
@article{krummenacher2025diffusion, author = {Krummenacher, Benjamin and Frey, Jonas and Tuna, Turcan and Vysotska, Olga and Hutter, Marco}, icra = {true}, journal = {IEEE International Conference on Robotics and Automation (ICRA)}, title = {Diffusion Based Robust LiDAR Place Recognition}, year = {2025} } - Seeing Through the Grass: Semantic Pointcloud Filter for Support Surface LearningAnqiao Li, Chenyu Yang, Jonas Frey, and 3 more authorsIEEE Robotics and Automation Letters, 2023
@article{li2023seeing, author = {Li, Anqiao and Yang, Chenyu and Frey, Jonas and Lee, Joonho and Cadena, Cesar and Hutter, Marco}, journal = {IEEE Robotics and Automation Letters}, number = {11}, pages = {7687--7694}, publisher = {IEEE}, ral = {true}, title = {Seeing Through the Grass: Semantic Pointcloud Filter for Support Surface Learning}, url = {https://arxiv.org/abs/2305.07995}, venue = {RAL}, volume = {8}, year = {2023} } - Unsupervised Continual Semantic Adaptation through Neural RenderingZhizheng Liu, Francesco Milano, Jonas Frey, and 3 more authorsIn Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023
@inproceedings{liu2023unsupervised, author = {Liu, Zhizheng and Milano, Francesco and Frey, Jonas and Siegwart, Roland and Blum, Hermann and Cadena, Cesar}, booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, cvpr = {true}, pages = {3031--3040}, title = {Unsupervised Continual Semantic Adaptation through Neural Rendering}, url = {https://arxiv.org/abs/2211.13969}, year = {2023} } - Holistic fusion: Task-and setup-agnostic robot localization and state estimation with factor graphsJulian Nubert, Turcan Tuna, Jonas Frey, and 4 more authorsunder review for IEEE Transactions on Robotics, 2025
@article{nubert2025holistic, author = {Nubert, Julian and Tuna, Turcan and Frey, Jonas and Cadena, Cesar and Kuchenbecker, Katherine J and Khattak, Shehryar and Hutter, Marco}, comment = {This paper is under review for IEEE Transactions on Robotics}, journal = {under review for IEEE Transactions on Robotics}, title = {Holistic fusion: Task-and setup-agnostic robot localization and state estimation with factor graphs}, tro = {true}, year = {2025} }
Workshops Publications
- Continual Learning of Semantic Segmentation using Complementary 2D-3D Data RepresentationsJonas Frey, Hermann Blum, Francesco Milano, and 2 more authorsIn NeurIPS - 2021 4th Robot Learning Workshop Self-Supervised and Lifelong Learning, 2021
@inproceedings{frey2022continual_workshop, author = {Frey, Jonas and Blum, Hermann and Milano, Francesco and Siegwart, Roland and Cadena, Cesar}, booktitle = {NeurIPS - 2021 4th Robot Learning Workshop Self-Supervised and Lifelong Learning}, title = {Continual Learning of Semantic Segmentation using Complementary 2D-3D Data Representations}, url = {https://arxiv.org/abs/2111.02156}, workshop = {true}, year = {2021} } - Fast Traversability Estimation for Wild Visual NavigationJonas Frey, Matias Mattamala, Nived Chebrolu, and 3 more authorsIn ICRA 2023 - Pretraining for Robotics (PT4R), 2023
@inproceedings{frey2023fast_workshop, author = {Frey, Jonas and Mattamala, Matias and Chebrolu, Nived and Cadena, Cesar and Fallon, Maurice and Hutter, Marco}, booktitle = {ICRA 2023 - Pretraining for Robotics (PT4R)}, title = {Fast Traversability Estimation for Wild Visual Navigation}, url = {https://arxiv.org/abs/2305.08510}, workshop = {true}, year = {2023} } - Autonomous Forest Inventory with Legged Robots: System Design and Field DeploymentMatı́as Mattamala, Nived Chebrolu, Benoit Casseau, and 5 more authorsICRA Workshop on Field Robotics, 2024
@article{mattamala2024autonomous, author = {Mattamala, Mat{\'\i}as and Chebrolu, Nived and Casseau, Benoit and Frei{\ss}muth, Leonard and Frey, Jonas and Tuna, Turcan and Hutter, Marco and Fallon, Maurice}, journal = {ICRA Workshop on Field Robotics}, title = {Autonomous Forest Inventory with Legged Robots: System Design and Field Deployment}, url = {https://arxiv.org/abs/2404.14157}, workshop = {true}, year = {2024} } -
 Risk-Guided Diffusion: Toward Deploying Robot Foundation Models In Space, Where Failure Is Not An OptionRohan Thakker, Adarsh Patnaik, Vince Kurtz, and 8 more authorsarXiv preprint arXiv:2506.17601, 2025
Risk-Guided Diffusion: Toward Deploying Robot Foundation Models In Space, Where Failure Is Not An OptionRohan Thakker, Adarsh Patnaik, Vince Kurtz, and 8 more authorsarXiv preprint arXiv:2506.17601, 2025@article{thakker2025risk, author = {Thakker, Rohan and Patnaik, Adarsh and Kurtz, Vince and Frey, Jonas and Becktor, Jonathan and Moon, Sangwoo and Royce, Rob and Kaufmann, Marcel and Georgakis, Georgios and Roth, Pascal and others}, journal = {arXiv preprint arXiv:2506.17601}, title = {Risk-Guided Diffusion: Toward Deploying Robot Foundation Models In Space, Where Failure Is Not An Option}, url = {https://arxiv.org/abs/2506.17601}, workshop = {true}, year = {2025} } - The GrandTour of BoxiTurcan Tuna, Jonas Frey, Lanke Frank Tarimo Fu, and 3 more authorsIn CoRL 2025 - Open-Source Hardware in the Era of Robot Learning, 2025
@inproceedings{tuna2025ws, author = {Tuna, Turcan and Frey, Jonas and Fu, Lanke Frank Tarimo and Fallon, Maurice and Cadena, Cesar and Hutter, Marco}, booktitle = {CoRL 2025 - Open-Source Hardware in the Era of Robot Learning}, title = {The GrandTour of Boxi}, url = {https://open-hardware-robots.github.io/CoRL2025/}, workshop = {true}, year = {2025} } -
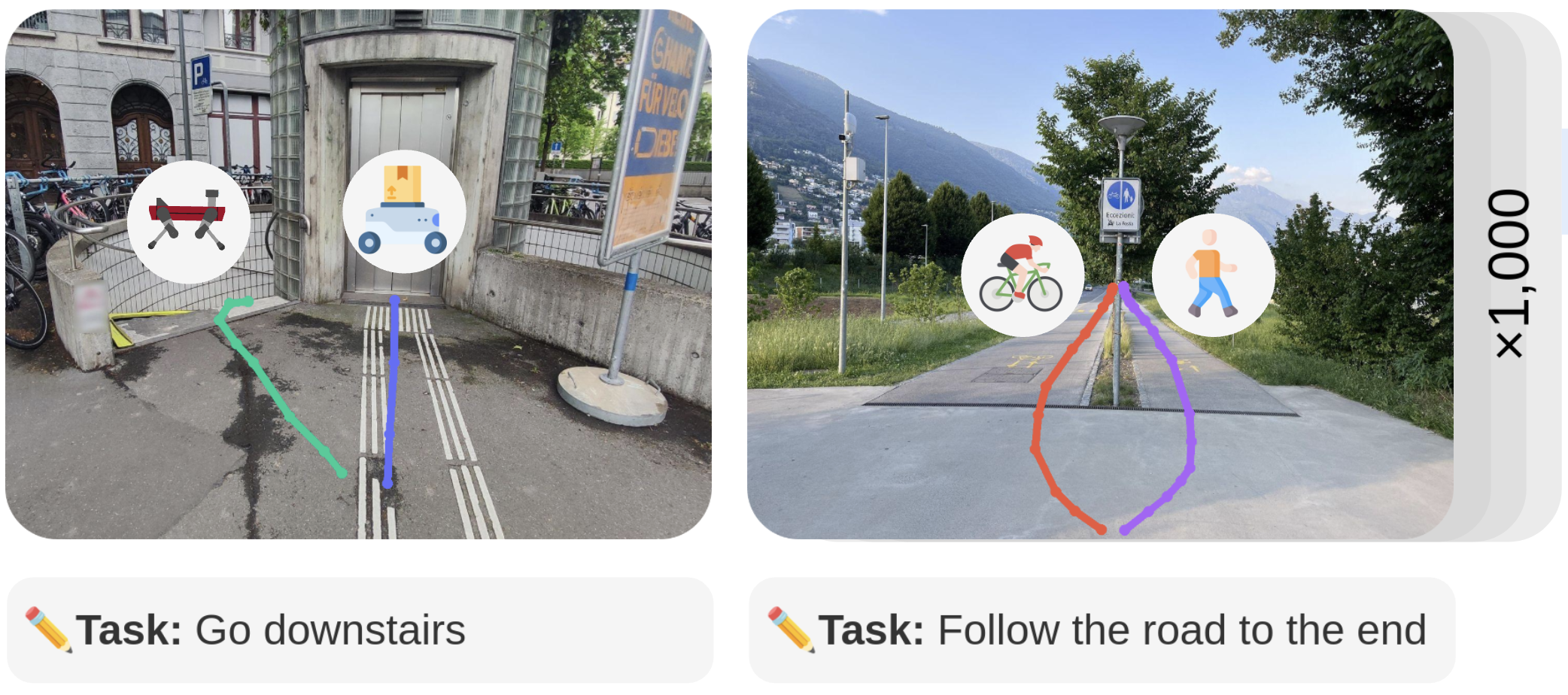 NaviTrace: Evaluating Embodied Navigation of Vision-Language ModelsTim Windecker, Jonas Frey, Manthan Patel, and 5 more authorsIn GRPs in the Wild: CoRL 2025 Workshop, 2025
NaviTrace: Evaluating Embodied Navigation of Vision-Language ModelsTim Windecker, Jonas Frey, Manthan Patel, and 5 more authorsIn GRPs in the Wild: CoRL 2025 Workshop, 2025@inproceedings{windecker2025ws, author = {Windecker, Tim and Frey, Jonas and Patel, Manthan and Reuss, Moritz and Schwarzkopf, Richard and Cadena, Cesar and Lioutikov, Rudolf and Hutter, Marco}, booktitle = {GRPs in the Wild: CoRL 2025 Workshop}, title = {NaviTrace: Evaluating Embodied Navigation of Vision-Language Models}, url = {https://openreview.net/forum?id=H2rNiI8s7s}, workshop = {true}, year = {2025} }
All Publications
- SMUG Planner: A Safe Multi-Goal Planner for Mobile Robots in Challenging EnvironmentsChangan Chen, Jonas Frey, Philip Arm, and 1 more authorIEEE Robotics and Automation Letters, 2023
@article{chen2023smug, author = {Chen, Changan and Frey, Jonas and Arm, Philip and Hutter, Marco}, journal = {IEEE Robotics and Automation Letters}, number = {11}, pages = {7170--7177}, publisher = {IEEE}, ral = {true}, title = {SMUG Planner: A Safe Multi-Goal Planner for Mobile Robots in Challenging Environments}, url = {https://arxiv.org/abs/2306.05309}, venue = {RAL}, volume = {8}, year = {2023} } - Identifying Terrain Physical Parameters From Vision - Towards Physical-Parameter-Aware Locomotion and NavigationJiaqi Chen, Jonas Frey, Ruyi Zhou, and 3 more authorsIEEE Robotics and Automation Letters, 2024
@article{chen2024identifying, author = {Chen, Jiaqi and Frey, Jonas and Zhou, Ruyi and Miki, Takahiro and Martius, Georg and Hutter, Marco}, doi = {10.1109/LRA.2024.3455788}, journal = {IEEE Robotics and Automation Letters}, keywords = {Decoding;Friction;Visualization;Training;Robot sensing systems;Navigation;Legged locomotion;Deep learning;Visual perception;Terrain mapping;Legged Robots;deep learning for visual perception;field robots}, number = {11}, pages = {9279-9286}, ral = {true}, title = {Identifying Terrain Physical Parameters From Vision - Towards Physical-Parameter-Aware Locomotion and Navigation}, url = {https://arxiv.org/abs/2408.16567}, volume = {9}, year = {2024} } - MEM: Multi-Modal Elevation Mapping for Robotics and LearningGian Erni, Jonas Frey, Takahiro Miki, and 2 more authorsIn International Conference on Intelligent Robots and Systems (IROS 2023), 2023
@inproceedings{erni2023mem, author = {Erni, Gian and Frey, Jonas and Miki, Takahiro and Mattamala, Matias and Hutter, Marco}, booktitle = {International Conference on Intelligent Robots and Systems (IROS 2023)}, iros = {true}, title = {MEM: Multi-Modal Elevation Mapping for Robotics and Learning}, url = {https://arxiv.org/abs/2309.16818v1}, year = {2023} } - Continual Adaptation of Semantic Segmentation using Complementary 2D-3D Data RepresentationsJonas Frey, Hermann Blum, Francesco Milano, and 2 more authorsIEEE Robotics and Automation Letters, 2022
@article{frey2022continual, author = {Frey, Jonas and Blum, Hermann and Milano, Francesco and Siegwart, Roland and Cadena, Cesar}, journal = {IEEE Robotics and Automation Letters}, number = {4}, pages = {11665--11672}, publisher = {IEEE}, ral = {true}, title = {Continual Adaptation of Semantic Segmentation using Complementary 2D-3D Data Representations}, url = {https://arxiv.org/abs/2111.02156}, venue = {RAL}, volume = {7}, year = {2022} } - Continual Learning of Semantic Segmentation using Complementary 2D-3D Data RepresentationsJonas Frey, Hermann Blum, Francesco Milano, and 2 more authorsIn NeurIPS - 2021 4th Robot Learning Workshop Self-Supervised and Lifelong Learning, 2021
@inproceedings{frey2022continual_workshop, author = {Frey, Jonas and Blum, Hermann and Milano, Francesco and Siegwart, Roland and Cadena, Cesar}, booktitle = {NeurIPS - 2021 4th Robot Learning Workshop Self-Supervised and Lifelong Learning}, title = {Continual Learning of Semantic Segmentation using Complementary 2D-3D Data Representations}, url = {https://arxiv.org/abs/2111.02156}, workshop = {true}, year = {2021} } - Locomotion policy guided traversability learning using volumetric representations of complex environmentsJonas Frey, David Hoeller, Shehryar Khattak, and 1 more authorIn IROS, 2022
@inproceedings{frey2022locomotion, author = {Frey, Jonas and Hoeller, David and Khattak, Shehryar and Hutter, Marco}, booktitle = {IROS}, iros = {true}, organization = {IEEE}, pages = {5722--5729}, title = {Locomotion policy guided traversability learning using volumetric representations of complex environments}, url = {https://arxiv.org/abs/2203.15854}, year = {2022} } - Fast Traversability Estimation for Wild Visual NavigationJonas Frey, Matias Mattamala, Nived Chebrolu, and 3 more authorsIn Robotics: Science and Systems 2023, 2023
@inproceedings{frey2023fast, author = {Frey, Jonas and Mattamala, Matias and Chebrolu, Nived and Cadena, Cesar and Fallon, Maurice and Hutter, Marco}, booktitle = {Robotics: Science and Systems 2023}, rss = {true}, title = {Fast Traversability Estimation for Wild Visual Navigation}, url = {https://arxiv.org/abs/2305.08510}, year = {2023} } - Fast Traversability Estimation for Wild Visual NavigationJonas Frey, Matias Mattamala, Nived Chebrolu, and 3 more authorsIn ICRA 2023 - Pretraining for Robotics (PT4R), 2023
@inproceedings{frey2023fast_workshop, author = {Frey, Jonas and Mattamala, Matias and Chebrolu, Nived and Cadena, Cesar and Fallon, Maurice and Hutter, Marco}, booktitle = {ICRA 2023 - Pretraining for Robotics (PT4R)}, title = {Fast Traversability Estimation for Wild Visual Navigation}, url = {https://arxiv.org/abs/2305.08510}, workshop = {true}, year = {2023} } - RoadRunner - Learning Traversability Estimation for Autonomous Off-road DrivingJonas Frey, Shehryar Khattak, Manthan Patel, and 5 more authorsIEEE Transactions on Field Robotics 2024, 2024
@article{frey2024roadrunner, author = {Frey, Jonas and Khattak, Shehryar and Patel, Manthan and Atha, Deegan and Nubert, Julian and Padgett, Curtis and Hutter, Marco and Spieler, Patrick}, journal = {IEEE Transactions on Field Robotics 2024}, tfr = {true}, title = {RoadRunner - Learning Traversability Estimation for Autonomous Off-road Driving}, url = {https://arxiv.org/abs/2402.19341}, year = {2024} } - Boxi: Design Decisions in the Context of Algorithmic Performance for RoboticsJonas Frey, Turcan Tuna, Lanke Frank Tarimo Fu, and 8 more authorsRobotics: Science and Systems 2025, 2025
@article{frey2025boxi, author = {Frey, Jonas and Tuna, Turcan and Fu, Lanke Frank Tarimo and Weibel, Cedric and Patterson, Katharine and Krummenacher, Benjamin and M{\"u}ller, Matthias and Nubert, Julian and Fallon, Maurice and Cadena, Cesar and others}, journal = {Robotics: Science and Systems 2025}, rss = {true}, title = {Boxi: Design Decisions in the Context of Algorithmic Performance for Robotics}, year = {2025} } - Learning with 3D rotations, a hitchhiker’s guide to SO(3)A. René Geist, Jonas Frey, Mikel Zobro, and 2 more authorsIn International Conference on Machine Learning, 2024
@inproceedings{geist2024position, archiveprefix = {arXiv}, author = {Geist, A. René and Frey, Jonas and Zobro, Mikel and Levina, Anna and Martius, Georg}, booktitle = {International Conference on Machine Learning}, eprint = {2404.11735}, icml = {true}, learning = {true}, primaryclass = {cs.LG}, title = {Learning with 3D rotations, a hitchhiker's guide to SO(3)}, url = {https://arxiv.org/abs/2404.11735}, year = {2024} } - Resilient Legged Local Navigation: Learning to Traverse with Compromised Perception End-to-EndJin Jin, Chong Zhang, Jonas Frey, and 4 more authorsIn IEEE International Conference on Robotics and Automation (ICRA 2024), 2023
@inproceedings{jin2023resilient, author = {Jin, Jin and Zhang, Chong and Frey, Jonas and Rudin, Nikita and Mattamala, Matias and Cadena, Cesar and Hutter, Marco}, booktitle = {IEEE International Conference on Robotics and Automation (ICRA 2024)}, icra = {true}, title = {Resilient Legged Local Navigation: Learning to Traverse with Compromised Perception End-to-End}, url = {https://arxiv.org/abs/2310.03581}, year = {2023} } - DAPPER: Discriminability-Aware Policy-to-Policy Preference-Based Reinforcement Learning for Query-Efficient Robot Skill AcquisitionYuki Kadokawa, Jonas Frey, Takahiro Miki, and 2 more authorsunder review for IEEE Robotics & Automation Magazine, 2025
@article{kadokawa2025dapper, author = {Kadokawa, Yuki and Frey, Jonas and Miki, Takahiro and Matsubara, Takamitsu and Hutter, Marco}, comment = {This paper is under review for IEEE Robotics & Automation Magazine}, journal = {under review for IEEE Robotics & Automation Magazine}, ram = {true}, title = {DAPPER: Discriminability-Aware Policy-to-Policy Preference-Based Reinforcement Learning for Query-Efficient Robot Skill Acquisition}, year = {2025} } - Diffusion Based Robust LiDAR Place RecognitionBenjamin Krummenacher, Jonas Frey, Turcan Tuna, and 2 more authorsIEEE International Conference on Robotics and Automation (ICRA), 2025
@article{krummenacher2025diffusion, author = {Krummenacher, Benjamin and Frey, Jonas and Tuna, Turcan and Vysotska, Olga and Hutter, Marco}, icra = {true}, journal = {IEEE International Conference on Robotics and Automation (ICRA)}, title = {Diffusion Based Robust LiDAR Place Recognition}, year = {2025} } - Learning agile skills via adversarial imitation of rough partial demonstrationsChenhao Li, Marin Vlastelica, Sebastian Blaes, and 3 more authorsIn Conference on Robot Learning, 2023
@inproceedings{li2023learning, author = {Li, Chenhao and Vlastelica, Marin and Blaes, Sebastian and Frey, Jonas and Grimminger, Felix and Martius, Georg}, booktitle = {Conference on Robot Learning}, corl = {true}, loc = {true}, organization = {PMLR}, pages = {342--352}, title = {Learning agile skills via adversarial imitation of rough partial demonstrations}, url = {https://arxiv.org/abs/2206.11693}, year = {2023} } - Seeing Through the Grass: Semantic Pointcloud Filter for Support Surface LearningAnqiao Li, Chenyu Yang, Jonas Frey, and 3 more authorsIEEE Robotics and Automation Letters, 2023
@article{li2023seeing, author = {Li, Anqiao and Yang, Chenyu and Frey, Jonas and Lee, Joonho and Cadena, Cesar and Hutter, Marco}, journal = {IEEE Robotics and Automation Letters}, number = {11}, pages = {7687--7694}, publisher = {IEEE}, ral = {true}, title = {Seeing Through the Grass: Semantic Pointcloud Filter for Support Surface Learning}, url = {https://arxiv.org/abs/2305.07995}, venue = {RAL}, volume = {8}, year = {2023} } - Versatile skill control via self-supervised adversarial imitation of unlabeled mixed motionsChenhao Li, Sebastian Blaes, Pavel Kolev, and 3 more authorsIn IEEE International Conference on Robotics and Automation (ICRA 2023), 2023
@inproceedings{li2023versatile, author = {Li, Chenhao and Blaes, Sebastian and Kolev, Pavel and Vlastelica, Marin and Frey, Jonas and Martius, Georg}, booktitle = {IEEE International Conference on Robotics and Automation (ICRA 2023)}, icra = {true}, loc = {true}, organization = {IEEE}, pages = {2944--2950}, title = {Versatile skill control via self-supervised adversarial imitation of unlabeled mixed motions}, url = {https://arxiv.org/abs/2209.07899}, year = {2023} } - Unsupervised Continual Semantic Adaptation through Neural RenderingZhizheng Liu, Francesco Milano, Jonas Frey, and 3 more authorsIn Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023
@inproceedings{liu2023unsupervised, author = {Liu, Zhizheng and Milano, Francesco and Frey, Jonas and Siegwart, Roland and Blum, Hermann and Cadena, Cesar}, booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition}, cvpr = {true}, pages = {3031--3040}, title = {Unsupervised Continual Semantic Adaptation through Neural Rendering}, url = {https://arxiv.org/abs/2211.13969}, year = {2023} } - Autonomous Forest Inventory with Legged Robots: System Design and Field DeploymentMatı́as Mattamala, Nived Chebrolu, Benoit Casseau, and 5 more authorsICRA Workshop on Field Robotics, 2024
@article{mattamala2024autonomous, author = {Mattamala, Mat{\'\i}as and Chebrolu, Nived and Casseau, Benoit and Frei{\ss}muth, Leonard and Frey, Jonas and Tuna, Turcan and Hutter, Marco and Fallon, Maurice}, journal = {ICRA Workshop on Field Robotics}, title = {Autonomous Forest Inventory with Legged Robots: System Design and Field Deployment}, url = {https://arxiv.org/abs/2404.14157}, workshop = {true}, year = {2024} } - Building Forest Inventories with Autonomous Legged Robots–System, Lessons, and Challenges AheadMatı́as Mattamala, Nived Chebrolu, Jonas Frey, and 5 more authorsIEEE Transactions on Field Robotics 2025, 2024
@article{mattamala2025building, author = {Mattamala, Mat{\'\i}as and Chebrolu, Nived and Frey, Jonas and Frei{\ss}muth, Leonard and Oh, Haedam and Casseau, Benoit and Hutter, Marco and Fallon, Maurice}, journal = {IEEE Transactions on Field Robotics 2025}, tfr = {true}, title = {Building Forest Inventories with Autonomous Legged Robots--System, Lessons, and Challenges Ahead}, url = {https://arxiv.org/abs/2404.14157}, year = {2024} } - Wild Visual Navigation: Fast Traversability Learning via Pre-Trained Models and Online Self-SupervisionMatías Mattamala, Jonas Frey, Piotr Libera, and 5 more authorsIn Autonomous Robots, 2024
@inproceedings{mattamala24wild, archiveprefix = {arXiv}, auro = {true}, author = {Mattamala, Matías and Frey, Jonas and Libera, Piotr and Chebrolu, Nived and Martius, Georg and Cadena, Cesar and Hutter, Marco and Fallon, Maurice}, booktitle = {Autonomous Robots}, eprint = {2404.07110}, primaryclass = {cs.RO}, title = {Wild Visual Navigation: Fast Traversability Learning via Pre-Trained Models and Online Self-Supervision}, url = {https://arxiv.org/abs/2404.07110}, year = {2024} } - Holistic fusion: Task-and setup-agnostic robot localization and state estimation with factor graphsJulian Nubert, Turcan Tuna, Jonas Frey, and 4 more authorsunder review for IEEE Transactions on Robotics, 2025
@article{nubert2025holistic, author = {Nubert, Julian and Tuna, Turcan and Frey, Jonas and Cadena, Cesar and Kuchenbecker, Katherine J and Khattak, Shehryar and Hutter, Marco}, comment = {This paper is under review for IEEE Transactions on Robotics}, journal = {under review for IEEE Transactions on Robotics}, title = {Holistic fusion: Task-and setup-agnostic robot localization and state estimation with factor graphs}, tro = {true}, year = {2025} } - RoadRunner M&M - Learning Multi-Range Multi-Resolution Traversability Maps for Autonomous Off-Road NavigationManthan Patel, Jonas Frey, Deegan Atha, and 3 more authorsIEEE Robotics and Automation Letters, 2024
@article{patel2024roadrunner, author = {Patel, Manthan and Frey, Jonas and Atha, Deegan and Spieler, Patrick and Hutter, Marco and Khattak, Shehryar}, doi = {10.1109/LRA.2024.3490404}, journal = {IEEE Robotics and Automation Letters}, number = {12}, pages = {11425-11432}, ral = {true}, title = {RoadRunner M&M - Learning Multi-Range Multi-Resolution Traversability Maps for Autonomous Off-Road Navigation}, url = {https://arxiv.org/abs/2409.10940}, volume = {9}, webpage = {https://leggedrobotics.github.io/roadrunner_mm/}, year = {2024} } - Learned Perceptive Forward Dynamics Model for Safe and Platform-aware Robotic NavigationPascal Roth, Jonas Frey, Cesar Cadena, and 1 more authorRobotics: Science and Systems 2025, 2025
@article{roth2025learned, author = {Roth, Pascal and Frey, Jonas and Cadena, Cesar and Hutter, Marco}, journal = {Robotics: Science and Systems 2025}, rss = {true}, title = {Learned Perceptive Forward Dynamics Model for Safe and Platform-aware Robotic Navigation}, year = {2025} } - Zero-Shot Offline Imitation Learning via Optimal TransportThomas Rupf, Marco Bagatella, Nico Gürtler, and 2 more authorsIn , 2025
@inproceedings{rupf2024zeroshot, archiveprefix = {arXiv}, author = {Rupf, Thomas and Bagatella, Marco and Gürtler, Nico and Frey, Jonas and Martius, Georg}, eprint = {2410.08751}, icml = {true}, journal = {International Conference on Machine Learning (ICML)}, learning = {true}, primaryclass = {cs.LG}, title = {Zero-Shot Offline Imitation Learning via Optimal Transport}, url = {https://arxiv.org/abs/2410.08751}, year = {2025} } - Learning risk-aware quadrupedal locomotion using distributional reinforcement learningLukas Schneider, Jonas Frey, Takahiro Miki, and 1 more authorIn IEEE International Conference on Robotics and Automation (ICRA 2024), 2023
@inproceedings{schneider2023learning, author = {Schneider, Lukas and Frey, Jonas and Miki, Takahiro and Hutter, Marco}, booktitle = {IEEE International Conference on Robotics and Automation (ICRA 2024)}, icra = {true}, loc = {true}, title = {Learning risk-aware quadrupedal locomotion using distributional reinforcement learning}, url = {https://arxiv.org/abs/2309.14246}, year = {2023} } - Risk-Guided Diffusion: Toward Deploying Robot Foundation Models In Space, Where Failure Is Not An OptionRohan Thakker, Adarsh Patnaik, Vince Kurtz, and 8 more authorsarXiv preprint arXiv:2506.17601, 2025
@article{thakker2025risk, author = {Thakker, Rohan and Patnaik, Adarsh and Kurtz, Vince and Frey, Jonas and Becktor, Jonathan and Moon, Sangwoo and Royce, Rob and Kaufmann, Marcel and Georgakis, Georgios and Roth, Pascal and others}, journal = {arXiv preprint arXiv:2506.17601}, title = {Risk-Guided Diffusion: Toward Deploying Robot Foundation Models In Space, Where Failure Is Not An Option}, url = {https://arxiv.org/abs/2506.17601}, workshop = {true}, year = {2025} } - The GrandTour of BoxiTurcan Tuna, Jonas Frey, Lanke Frank Tarimo Fu, and 3 more authorsIn CoRL 2025 - Open-Source Hardware in the Era of Robot Learning, 2025
@inproceedings{tuna2025ws, author = {Tuna, Turcan and Frey, Jonas and Fu, Lanke Frank Tarimo and Fallon, Maurice and Cadena, Cesar and Hutter, Marco}, booktitle = {CoRL 2025 - Open-Source Hardware in the Era of Robot Learning}, title = {The GrandTour of Boxi}, url = {https://open-hardware-robots.github.io/CoRL2025/}, workshop = {true}, year = {2025} } - NaviTrace: Evaluating Embodied Navigation of Vision-Language ModelsTim Windecker, Jonas Frey, Manthan Patel, and 5 more authorsIn GRPs in the Wild: CoRL 2025 Workshop, 2025
@inproceedings{windecker2025ws, author = {Windecker, Tim and Frey, Jonas and Patel, Manthan and Reuss, Moritz and Schwarzkopf, Richard and Cadena, Cesar and Lioutikov, Rudolf and Hutter, Marco}, booktitle = {GRPs in the Wild: CoRL 2025 Workshop}, title = {NaviTrace: Evaluating Embodied Navigation of Vision-Language Models}, url = {https://openreview.net/forum?id=H2rNiI8s7s}, workshop = {true}, year = {2025} }